Вертолет, 2004 №1

Вертолет, 2004 №1 читать книгу онлайн
Внимание! Книга может содержать контент только для совершеннолетних. Для несовершеннолетних чтение данного контента СТРОГО ЗАПРЕЩЕНО! Если в книге присутствует наличие пропаганды ЛГБТ и другого, запрещенного контента - просьба написать на почту [email protected] для удаления материала
Вертолеты этой модификации активно использовались в первую и вторую чеченские кампании, доставляя ценные разведывательные данные нашему командованию. К сожалению, нехватка обычных транспортных вертолетов приводит к тому, что демонтируется сложная аппаратура и вертолет эксплуатируется как обычный транспортный. Так, в одной из частей был «раздет» Ми-8МТИ и отправлен на Северный Кавказ.
В завершение хотелось бы отметить, что я коснулся далеко не всех специальных модификаций легендарного Ми-8, который, думается, еще долгое время будет выполнять самые разные гражданские и военные задачи.
Александр АРТЮХ, начальник группы вооружения вертолетов
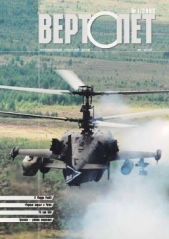
Новые технологии монтажа

Установка секции вертолетом Ми-26
В октябре прошлого года жители Кубани стали свидетелями уникальной строительно-монтажной операции — установки с помощью вертолетов Ми-26 и Ка-32 радиотелевизионной 127-метровой мачты. Это был самый крупномасштабный проект авиационных строительно-монтажных работ (АСМР) на Северном Кавказе, в реализации которого принимали участие вертолеты. Многотонную конструкцию летчики-испытатели ОАО НИК «ПАНХ» установили всего за три дня. Контрольная сборка мачты, состоящей из 13 секций, прошла на земле. Затем до 32-метровой отметки мачта собиралась с помощью специального крана. А вот дальше к монтажу подключился Ми-26, который и устанавливал одну за другой укрупненные секции (на каждую из которых установили специальный ловитель) на различных высотных отметках. Завершил цикл работ экипаж вертолета Ка-32, установив последнюю 8-метровую секцию на вершину мачты.
Уникальность работ заключалась в том, что впервые в отечественной практике АСМР экипажем Ми-26 был выполнен монтаж конструкций массой от 14 до 15 тонн при пилотировании вертолета косвенны. у методом, то есть по командам, подаваемым, командиру вертолета одним из членов экипажа. При таком методе пилот контролирует положение вертолета над точкой монтажа, сравнивая собственное восприятие окружающей обстановки с показаниями приборов и информацией о пространственно-временном изменении параметров системы «экипаж — вертолет — объект монтажа», получаемой от бортоператора внешней подвески или от наземного руководителя работ. Эффективность выполнения монтажа при этом во многом зависит от устойчивой визуальной связи пилота с выбранными ориентирами и от точности подаваемых ему команд на перемещение вертолета в необходимом для установки объекта на правлении. Такая технология работ непроста и требует особенно четкой организации внимания пилота.
В рамках поставленной задачи было выполнено девять монтажных циклов с различными по массе и моментам инерции секциями мачты (длина канатов внешней подвески составляла в зависимости от способа строповки и размеров секций от 10 до 15 м). Все перемещения вертолета над монтажным стыком, а также корректировка его положения на режиме висения при закреплении секций на месте их установки выполнялись пилотом-монтажником по командам бортового оператора. В качестве искусственного ориентира была выбрана стрела подъемного крана, верхняя точка которой находилась на высоте 50 м относительно основания мачты.
Расходы управления при выполнении монтажа первых секций массой 14 т на высотах до 80 у были достаточно велики.
Это объясняется высокими значениями момента инерции груза на внешней подвеске (до 1000000 кгм2), а также достаточно уверенному пилотирование. у вертолета экипажем. Темп перемещения ручки ППУ в продольном направлении при этом составил ± 2,5-+ 5 мм/с, а в поперечном ± 10-± 15 мм/с. Интенсивность перемещения пилотом рычага общего шага (ОШ) винта по указателю (УШВ) в момент висения вертолета над заданной точкой монтажа находилась в пределах ± 0,5-± 0,8 град/с.
С увеличение у высоты монтажной площадки, уменьшением габаритов и массы устанавливаемых секций движения органами управления приобрели высокочастотный неуверенный характер. Перемещения ручки ППУ при установке заключительной секции массой 9 т на отметке 127 м в продольном направлении осуществлялись с частотой ± 0,5 мм/с, а в поперечном ± 5-± 8 мм/с. При этом высота висения вертолета относительно основания мачты в момент монтажа секции составила 147 м.
От летчика, пилотирующего вертолет на режиме висения, требуются более строгие, координированные в соответствии с поступаемыми от бортового оператора командами движения рычага общего шага винта и ручки продольного управления. Все это усложняет технику пилотирования, способствует появлению ошибок, приводящих к разбапансировке вертолета и возможному возникновению его «просадки» перед зависанием, что небезопасно, особенно при выполнении перемещений вертолета с грузом на внешней подвеске вблизи монтажного стыка.
Именно в таких ситуациях наиболее остро возникает необходимость в эффективных системах азимутальной ориентации и стабилизации грузов на внешней подвеске (САО) — устройствах, исключающих необходимость визуального ориентирования объектов для установки их в проектное положение. При выполнении монтажа мачты с помощью вертолета Ми-26 была использована опытная модель внешней подвески с САО, оборудованная переходными звеньями от одноточечного крепления на вертолете к бифилярному (двухстропному) на грузе. В основу устройства была положена разработанная ранее в ОАО НПК «ПАНХ» модель САО для вертолета Ка-32 (рис. 1).
При развороте груза на бифилярной внешней подвеске в плоскости, параллельной плоскости вращения несущего винта, в системе «механизм — подвеска — груз» возникают (при торможении, в частности) крутильные колебания, значительно усложняющие задачу по точному наведению груза на проектные отметки или специальные ловители. Источником возникновения таких колебаний являются силы, действующие на груз и тросы внешней подвески. Их физические особенности и механизм образования общеизвестны. Для компенсации этих колебаний и разворота груза на ВП, как правило, используются различные системы гибких амортизаторов или жестких звеньев, управляемых от механизма привода САО.
Специалистами из Краснодара в качестве реверсивного привода были выбраны электромеханизмы двух бортовых лебедок ЛГ-1500, устанавливаемые в грузовой кабине вертолета Ми-26. Они успешно обеспечили повороты груза через систему тросов и поворотных роликов с угловой скоростью до 10 град/с и угловым ускорением до 3,5 град/с², при которых в элементах конструкции САО отсутствовали критические нагрузки и в то же время обеспечивалось оперативное управление грузом, массой до 15 тонн и моментом, инерции до 1000000 кгм2 при наведении груза на проектные отметки. Время на проведение монтажных операции было сокращено более чем на 10 % по сравнению со временем, затраченным на выполнение аналогичных работ с использованием штатной внешней подвески.
Сама идея создания таких систем для вертолетов, выполняющих АСМР, не нова. Еще в 1971 году американская компания Enckson Air-Crane впервые применила систему азимутальной фиксации (САФ) груза на внешней подвеске вертолета S-64E при строительстве высоковольтных линий на северо-западе США. Сначала это устройство позволяло лишь фиксировать положение груза на внешней подвеске в плоскости, параллельной плоскости вращения несущего винта, под наиболее удобным углом к месту монтажного стыка. При этом, вертолет ориентировался экипажем над монтажной площадкой против ветра, а монтируемая конструкция еще перед взлетов фиксировалась на подвеске з необходимом для монтажа положении.
В настоящее время S-64E грузоподъемностью 10 т и его модификация S-64F грузоподъемностью 12,5 т, оборудованные САО, успешно применяются американскими компаниями Erickson Air-Crane и Evergreen Helicopters в электросетевом строительстве в США, Канаде, Швеции и Южной Корее.
За рубежом (судя по патентным материалам.) распространенным способом стабилизации груза по азимуту является двух или трехточечный его подвес к вертолету. В отечественной практике этот способ не используется ввиду отсутствия надежных систем, обеспечивающих синхронное управление замками ВП в момент отцепки (сброса) груза при завершении АС24Р или в случае развития аварийной ситуации в полете. Штатные внешние подвески отечественных вертолетов выполнены, как правило, по одноточечной схеме крепления груза на ВП и имеют только один основной грузодержатель (замок ВП).